
Но существуют случаи, когда простейшие решения типа «Есть—Нет» или «Включено—Выключено» уже недостаточны. Примером тут может служить пропорциональное управление, нуждающееся в непрерывной передаче изменяющихся данных (информации). Поскольку передача информации посредством импульсов имеет, как уже об этом упоминалось, много достоинств, рассмотрим теперь виды импульсной модуляции, применяемой в технике пропорционального управления. При этом можно использовать амплитудную или частотную модуляцию несущей ВЧ. Для частотной модуляции, как правило, для передачи НЧ сигналов требуется более широкая полоса частот, а передатчик и приемник при этой модуляции должны быть более сложными, чем в случае амплитудной модуляции. Поэтому в технике дистанционного управления моделями частотную модуляцию пока применяют редко, хотя она обладает другими достоинствами (например, нечувствительностью к помехам). Кроме того, во многих странах эта модуляция не разрешается для радиомоделистов. Поэтому рассмотрим вопросы, связанные с амплитудной модуляцией несущей ВЧ.
Сигналы управления или команды можно представить в виде графика, из которого видно, как изменяется значение (амплитуда) тока во времени. Однако тот же сигнал можно представить в виде графика, обозначающего частоты, из которых данный сигнал состоит, или же с помощью спектра. Если отдельный сигнал имеет форму чистой синусоиды (рис. 7.12 а), то его спектральная эпюра (график) будет представлять вертикальную линию, высота которой определяется энергией колебаний (рис. 7.12 б).
Когда составной сигнал состоит из чистых синусоидальных колебаний с несколькими частотами, то его спектр имеет соответствующее число линий. В действительности спектр сложного сигнала состоит из ряда линий — на основной частоте, например f0, и на частотах гармоник 2f0, 3f0 и т. д. Одиночный импульс (или серию импульсов) можно составить из синусоидальных колебаний или, наоборот, разложить его на синусоиды.
Одиночный прямоугольный импульс (рис. 7.12 ж) имеет непрерывный спектр, это означает, что он содержит колебания каждой частоты от нуля до бесконечности, за исключением тех, в которых спектр переходит через нуль (f=1/Tи, 2/Tи, 3/Tи и т. д., рис. 7.12 з). На практике можно опустить все колебания, частота которых лежит выше 1/Tи (следовательно, получим непрерывный спектр, затухающий в области более высоких частот).
Если теперь рассмотреть серию импульсов (рис. 7.12 м) и их спектр (рис. 7.12я), то получим линейчатый, а не сплошной спектр. Огибающая этих линий зависит от ширины импульса (она понижается до нуля в точках f=1/Ти, 2/Ти и т. д.), а линии отстоят друг от друга на частоту повторения импульсов 1/Ти. Частота повторения указывает, сколько периодов (следовательно, импульсов) укладывается в течение одной секунды. Когда Т или Ти не постоянны, то интервалы между отдельными линиями начинают изменяться во времени; если импульсы шире, то спектр сужается, а уменьшение частоты повторения приводит к сгущению линий. Хорошо также знать, что достаточно использовать некоторое небольшое количество начальных гармоник, чтобы получить сигнал, близкий к прямоугольной форме.
До сих пор мы рассматривали только так называемые видеоимпульсы (например, постоянного тока). Теперь посмотрим, что происходит, когда этими импульсами модулируют несущую ВЧ. Это будут так называемые импульсы несущей частоты (радиоимпульсы).
Модулированный сигнал ВЧ — это колебания ВЧ с огибающей по определенному закону (например, прямоугольники или синусоида).
Передача модулированного ВЧ сигнала связана с передачей определенного спектра частот. Поэтому, ограничивая полосу передающего спектра, получаем различное воспроизведение конфигурации сигнала (рис. 7.12 р). Командные импульсы имеют (рис. 7.12 м) спектр (рис. 7.12 я), а сигнал ВЧ, промодулированный этими импульсами, и его спектр показаны на рис. 7.12 о, п.
Легко заметить, что спектр сигнала ВЧ (с одной стороны симметрии) такой же, как спектр командных импульсов.
Как уже известно, каждая линия в спектре представляет энергию одного из колебаний, образующих сигнал. Отсюда общая энергия сигнала будет суммой энергий всех линий спектра, а энергия сигнала с непрерывным спектром будет равна площади между обеими огибающими спектра и осями координат графика, описывающего сигнал.
Модуляция
Модуляция — это процесс, изменяющий параметры ВЧ сигнала передатчика по амплитуде, частоте, фазе и т. д., необходимый при передаче командных сигналов для приемника модели.
Амплитудная модуляция
При амплитудной модуляции под влиянием модулирующего процесса (НЧ или импульсы) изменяется амплитуда ВЧ колебаний (см. рис. 7.12). Отношение наибольшего прироста амплитуды промодулированной несущей ВЧ к ее амплитуде без модуляции называется глубиной модуляции. Модуляция сигнала при глубине более 100% называется перемодуляцией. Перемодуляция ВЧ сигнала приводит к резким искажениям принимаемых сигналов, но это свойство модуляции используется в дистанционном управлении для одноканальных систем управления с резонансными реле. Однако при перемодуляции резко возрастает ширина излучаемого спектра.
Несущая ВЧ с синусоидальной модуляцией амплитуды содержит три составляющие: несущую ВЧ с постоянной амплитудой и частотой, равной немодулированной частоте, и две боковые частоты с одинаковыми амплитудами, изменяющимися пропорционально глубине модуляции. Частота одной из этих боковых частот больше, а другой — меньше частоты несущей на частоту модулирующей формы.
Если разложить несущую ВЧ, промодулированную на 100% синусоидальной формой, на составляющие частоты, то получим спектр, показанный на рис. 7.12 г. Несущая ВЧ с частотой FQ имеет относительную амплитуду 1. Возникают две симметричные несущие — F0—f и F0+f — с их относительными амплитудами, равными 1/2 (f — частота модулирующего процесса). Следовательно, в результате модуляции несущей ВЧ мы получаем спектр сигнала, содержащий также симметричные боковые частоты, которые образуют полосу частот, необходимую для передачи понятного сигнала.
Ширина этой полосы равна двукратной модулирующей частоте (т. е. частоте данного канала НЧ), и в его диапазоне не может одновременно работать какое-либо другое управляющее устройство. Так будет, когда модулируют амплитуду несущей ВЧ чистой синусоидальной формой, так называемым простым тоном. Но в дистанционном управлении моделями применяют модуляцию многими простыми тонами, а также прямоугольной формой. Тогда спектр сигнала и частота полосы подвергаются значительному расширению (рис. 7.12 д—л), что неблагоприятно сказывается на возможности прохождения помех для других моделей.
Из сказанного следует, что передача информации чаще всего диктует необходимость использования не отдельной частоты, а скорее всего, всей полосы. Эти частоты должны умещаться в отведенной для радиомоделистов полосе шириной в 325 кГц (27,282—26,957 МГц). В зависимости от частоты модуляции увеличивается или уменьшается (относительно несущей ВЧ) частота боковых полос на значение, равное частоте звуковых колебаний. Следовательно, для передачи сигналов необходима полоса частот с шириной, равной удвоенной наибольшей модулирующей частоте. Отсюда следует также, что для передачи только сигналов немодулированной несущей ВЧ необходима очень узкая полоса, поскольку амплитуда сигналов в течение 1 с изменяется мало.
Небольшой транзисторный передатчик легче всего можно модулировать путем обычного включения и выключения оконечного каскада транзисторным ключом, т. е. в системе амплитудной манипуляции. Однако простота и эффективность такого устройства достигаются за счет исключительно большой (по сравнению с другими областями радиосвязи) полосы передачи.
Современные правила заставляют ограничивать отведенные диапазоном частоты (например, 27,12 МГц ±0,6%), в которых требуется разместить большое количество радиомодельных устройств, поэтому приходится суживать полосу частот, занимаемую модулированной частотой каждого работающего передатчика. Поэтому чаще встречается в радиоустройствах заводского изготовления поворот от наиболее эффективной прямоугольной модуляции в сторону синусоидальной модуляции глубиной 80—95%. В дюбительских устройствах применяется прямоугольная модуляция, но с округлением наружного угла импульсов и легким наклоном их откосов. Таким образом удается понижать уровень амплитуды боковых полос примерно на 0,2% относительно несущей ВЧ в полосе, равной удесятеренной модулирующей частоте.
Следует добавить, что при использовании амплитудной модуляции полоса частот занимает значительно большее место, чем при использовании простейшего передатчика с манипулированием постоянной немодулированной несущей ВЧ. В случае 100%-ной модуляции лишь одна треть общей мощности содержится в боковых полосах (остальные две трети приходятся на мощность несущей ВЧ). Поэтому в самом лучшем случае полезная мощность равна лишь одной трети общей излучаемой мощности. При мелкой модуляции полезная мощность будет еще меньше, поскольку мощность боковых полос уменьшается пропорционально квадрату коэффициента глубины модуляции. При 50%-ной модуляции полезная мощность равна только одной десятой всей излучаемой мощности. Из всего этого следует, что дальность действия передатчика зависит от глубины модуляции и мощности несущей ВЧ.
Среднее значение мощности сигнала, модулированного при 100%-ной глубине модуляции, достигает 150% полезной мощности несущей ВЧ. Иначе говоря, для получения 100%-ной глубины модуляции надо подвести в систему мощность боковых полос, равную половине мощности несущей ВЧ. Это определяет потребную выходную мощность модулятора.
При 100%-ной глубине модуляции ток антенны возрастает на 23% по сравнению с током антенны при отсутствии модуляции, а пиковая мощность модулированного сигнала достигает четырехкратного значения мощности сигнала немодулированной несущей ВЧ. Если ток антенны уменьшается, то происходит так называемая отрицательная модуляция, дающая большие искажения (рис. 7.12 с). Это свидетельствует о перегрузке оконечного каскада или о перемодулировании. В простых передатчиках это видно по некоторому затуханию лампового указателя излучения после включения модуляции. При управлении одноканальными устройствами нет надобности заниматься этим явлением, но в случае многоканальных схем, особенно при одновременном управлении, дело обстоит иначе. Правильная модуляция (так называемая положительная) дает после ее включения эффект повышения яркости света лампочки указателя излучения (рис. 7.12 т).
Если в модуляторе генерируются две (или больше) звуковые частоты синусоидальной формы, то надо понижать выходные мощности каждой из них пропорционально числу одновременных сигналов, а именно на 50% при двух сигналах, на 33% при трех сигналах, на 25% при четырех сигналах и т. д. Важно, чтобы в момент достижения пика модуляции ее глубина не превышала 100%. Хотя на практике мала вероятность того, что все посылаемые сигналы получат максимальную амплитуду в одно и то же время (поэтому можно выходную мощность отдельных генераторов установить несколько выше теоретических номинальных данных), все же общий вывод таков: при одновременной посылке нескольких сигналов, модулированных синусоидальной формой (что является тут обязательным условием), дальность действия устройства уменьшается примерно пропорционально числу этих сигналов (поскольку дальность действия зависит, в числе прочего, от глубины модуляции). Кроме того, существует опасность возникновения результирующих частот (суммирующих или вычитающих). Следует также добавить, что достижение в приемнике надежной селекции более трех сигналов низкой частоты одновременно связано с большими трудностями. Поэтому для одновременной посылки нескольких управляющих сигналов вместо простой частотной селекции применяют теперь более современные технические решения.
Напомним также, что если несущую ВЧ модулируют в передатчике одновременно несколькими звуковыми частотами, то возникает много боковых частот, суммы которых образуют боковые полосы, расположенные по обеим сторонам несущей ВЧ. Если несущую ВЧ промодулировать импульсами (получим спектр импульса), то спектр его будет распределен с обеих сторон несущей F0. Отсюда легко заключить, что ширина полосы пропускания приемника должна быть по меньшей мере вдвое больше максимальной модулирующей частоты сигнала, которая в этом случае соответствует самой высокой передаваемой гармонике данной последовательности импульсов.
Импульсная модуляция. Принцип импульсной модуляции заключается в том, что сигнал звуковой частоты (т. е. модулирующий) модулирует импульсы тока ВЧ, а те, в свою очередь, модулируют несущую ВЧ передатчика.
Импульсная модуляция интересна с точки зрения мощности излучения передатчика. У нее, в отличие от других видов модуляции, передатчик посылает не непрерывную промодулирован-ную несущую ВЧ, а только кратковременные импульсы ВЧ. Передатчик в импульсе может отдать значительно большую мощность, чем при излучении непрерывной несущей ВЧ. Если, например, передатчик работает с импульсом 1 мкс (10—6 с), а затем имеет паузу в 100 мкс, то отношение обоих времен составляет 1:100. Когда непрерывная несущая ВЧ имеет мощность 2 Вт, то мощность в импульсе будет в 100 раз больше, т. е. составит 200 Вт!
Вот основные преимущества импульсной модуляции: значительная мощность в импульсе, следовательно, большая дальность действия небольшого передатчика. В случае использования такого рода модуляции импульсов, который не влияет на их амплитуду, эта модуляция может быть нелинейной, причем не будет опасности появления искажений сигналов. Вторым достоинством импульсной модуляции является возможность координации с включением импульсов различных каналов в паузах между несущими импульсами. Импульсная модуляция имеет и недостатки. Например, контуры, настроенные в приемнике, должны быть широкополосными, чтобы они передавали импульсы без искажений. Ширина полосы пропускания определяется при импульсной модуляции не полосой самих посылаемых сигналов, а спектром частоты импульсов. Наличие значительного уровня шумов, понижающих чувствительность приемника, тоже является серьезным недостатком.
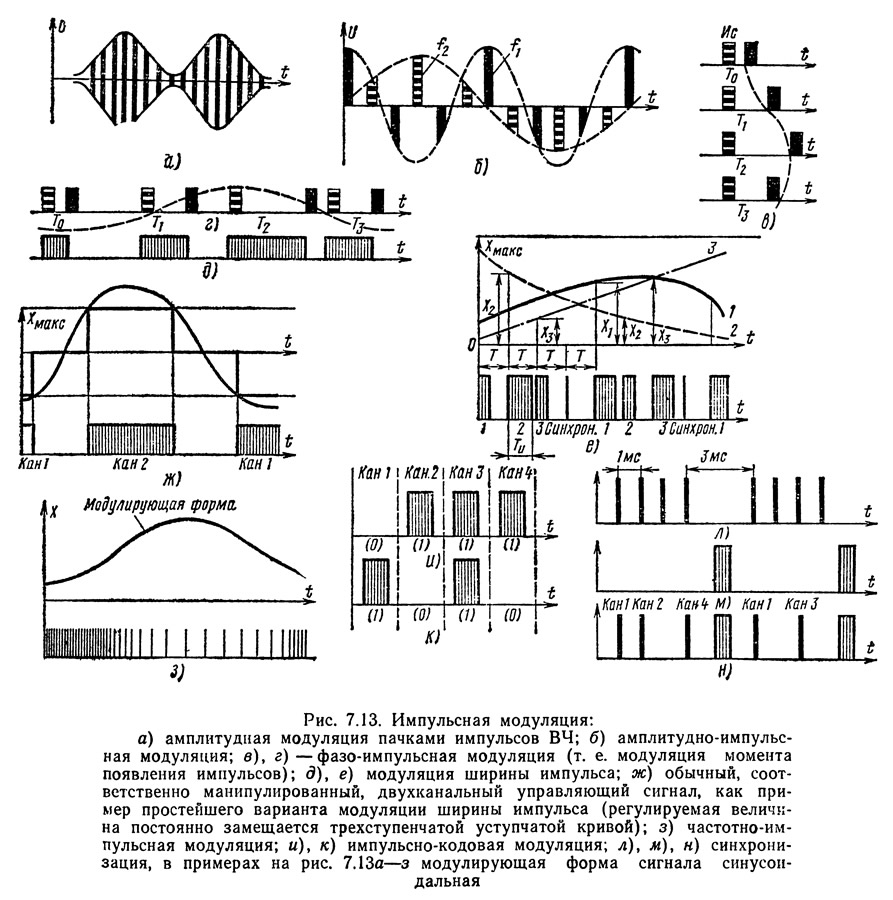
Входные величины сигнала — команды (например, положение ручки управления в передатчике) —можно передавать с помощью амплитудно-импульсной модуляции или же фазо-импульсной модуляции, модуляции ширины импульса, частотно-импульсной модуляции и кодо-импульсной модуляции. После того как в течение многих лет экспериментировали с различными системами модуляции, теперь на практике применяют главным образом модуляцию ширины импульса.
Амплитудно-импульсная модуляция
Определенную НЧ сигнала можно передавать посредством несущей ВЧ, амплитуднопро-модулированной двумя методами: модулированием несущей ВЧ классическими способами (сеточная модуляция, анодная модуляция и т. д.) посредством напряжений НЧ (см. рис. 7.12) или же посылая короткие импульсы ВЧ (пачки ВЧ), высота (амплитуда) которых соответствует мгновенным амплитудам НЧ и, следовательно, изменяется в такт с изменениями модулирующего напряжения (рис. 7.13 а). При этом типе амплитудно-импульсной модуляции появляются новые, дополнительные частоты, лежащие в интервале НЧ сигнала ниже или выше отдельных боковых частот промодулированной таким образом несущей ВЧ.
Последовательность импульсов, которой манипулируют колебания ВЧ, является в некоторой степени второй несущей частотой, так называемой вспомогательной несущей. Требуется, чтобы тактовая частота манипуляционных импульсов была по меньшей мере в 2 раза больше максимальной частоты передаваемого сигнала НЧ, так как иначе боковые полосы будут перекрывать друг друга, что приведет к помехам.
Вернемся теперь к приемнику. Сигнал после детектирования (рис. 7.13 б) имеет такой же спектр, как до манипуляции ВЧ. Тактовая частота и ее гармоники со своими боковыми частотами в нем сохранены, но, кроме того, образуется еще сама основная частота сигнала НЧ, которую необходимо отфильтровать.
С первого взгляда можно видеть, что тактовая частота и ее гармоники совершенно не несут информации. Однако если бы они были подавлены уже в модуляторе передатчика, то мы бы имели синусоидальную модуляцию, а именно ее и следует избегать.
Таким образом можно передавать сигналы не только для двух, но и для очень большого числа каналов, поочередно включая соответственно большее количество импульсов. Это и есть принцип многоканальной передачи нескольких сигналов с временным разделением. В то время как в простой цифровой системе передаются только сигналы 0 или 1, здесь можно для каждого канала передавать непрерывно изменяющиеся значения.
Если амплитуда отдельных импульсов не будет зависеть от звуковой частоты, а будет изменяться посредством ручки управления в передатчике, то появится возможность пропорционального управления. При этом создается возможность одновременной передачи сигналов (в данном примере — двух) одним импульсом, поскольку отдельные импульсы передаются поочередно и не могут влиять друг на друга.
Описанная система модуляции имеет и свои недостатки. Вот важнейшие из них: для получения эффекта пропорциональности надо передавать отдельные импульсы с одинаковой амплитудой, а это почти невозможно при дистанционном управлении моделями из-за значительных колебаний напряженности электромагнитного поля (см. рис. 7.13 а).
Фазо-импульсная модуляция
На рис. 7.13 в показан пример фазо-импульсной модуляции. При одном фиксированном (синхронизированном) импульсе другой, следующий за ним, изменяет свое положение (Т0, Т1, Т2, Т3) в зависимости от сигнала. Таким образом плавно изменяемый уровень напряжения сигнала превращается в плавно изменяемый интервал времени Т0—Т3. На рис. 7.13 г показан другой пример фазоимпульсной модуляции.
В отличие от амплитудно-импульсной модуляции и модуляции ширины импульса, мощность излучения ВЧ передатчика при фа-зо-импульсной модуляции не зависит от передаваемого модулирующего сигнала, а зависит от длительности, амплитуды и частоты повторения импульсов (т. е. от постоянных величин).
Широтно-импульсная модуляция
Применение простой схемы позволяет преобразовывать интервалы времени Т0—Т3, показанные на рис. 7.13 г, в ширину импульсов. Тогда сигнал принимает форму, изображенную на рис. 7.13 г, т. е. происходит модуляция ширины импульса. Здесь нет синхронизирующего импульса, но можно начало (фронт) мгновенных импульсов использовать в качестве синхронизирующей информации.
В пропорциональном управлении отклонению руля соответствует ширина соответствующего канального импульса (если используют поочередные импульсы для обслуживания различных органов в модели). После окончания серии импульсов появляется снова удлиненная пауза или же специальный характерный импульс, синхронизирующий передатчик с приемником (поскольку приемник должен одновременно «знать», какой импульс для какого канала предназначен).
Непрерывно изменяющийся входной сигнал (рис. 7.13 г) всегда включается после истечения определенного отрезка времени Т, а текущая амплитуда сигнала X1—3 зависит от длительности импульса Ти. Различные системы управления работают, подчиняясь уравнению Tи/T=X/Xмакс. На практике это означает, что можно без особых схемных трудностей подавать импульсы непосредственно на исполнительные механизмы. Если Х=0, то Ти=0, а поэтому и отношение Ти/Т=0, следовательно, не передается никакой сигнал. Когда Х=Хмакс, то Ти=Т, а отношение Ти/Т=1, следовательно, имеется непрерывный сигнал.
На рис. 7.13 е показана одновременная передача трех независимых операций управления — 1, 2, 3 — с помощью временного разделения каналов с использованием отдельных импульсов, промодулированных по времени. В каждом цикле предусмотрены четыре временные паузы Т, три из которых служат для передачи отдельных сигналов управления, а четвертая — для синхронизации работы между передатчиком и приемником. Благодаря этому передатчик и приемник будут одновременно переключаться с одного сигнала на другой.
Высокая надежность устройств с широтно-импульсной модуляцией достигается, конечно, за счет больших затрат технических средств. В таком передатчике входная величина (положение ручки управления) является постоянным напряжением. Его надо преобразовывать в импульсы, а в приемнике нужно, наоборот, преобразовывать импульсы в постоянное напряжение. Одновременно необходимо поочередно передавать импульсы для различных сигналов управления, а в приемнике соответственно выбирать эти сигналы.
Особым вопросом является синхронизация. Она достигается путем посылки специального импульса (или особо длинной паузы) или же с помощью вспомогательной несущей.
Важным параметром, определяющим правильность передачи сигналов, является время между очередными импульсами, предназначенными для одной операции управления. На практике это время настолько мало, что без помощи измерительных приборов невозможно установить, что передача не является непрерывной, т. е. что движению ручки управления всегда соответствует нужное отклонение руля.
Аппаратура дистанционного управления Kraft и Futaba передает сигналы с частотой повторения 50 Гц, а это значит, что каждые 0,020 с каждый сигнал получает новое установочное значение.
И еще одно замечание. Обычную многоканальную аппаратуру тоже можно считать работающей с модуляцией ширины импульса. Ведь хорошо натренированный оператор управляет моделью с помощью коротких импульсов, получая таким образом практически пропорциональное управление (рис. 7.13 ж). Известны также манипуляторы, преобразовывающие обычную многоканальную аппаратуру в простую систему пропорционального управления (см. рис. 3.12).
Подытожим сказанное выше: при модуляции ширины импульса сигнал модуляции низкой частоты изменяет длительность импульсов, а их амплитуда и частота повторения постоянны.
Если длительность импульса изменяется путем смещения вдоль оси времени фронта или спада импульса, то мы имеем дело с односторонней модуляцией импульсов. Если же под влиянием модулирующего сигнала низкой частоты перемещаются друг относительно друга вдоль оси времени и фронт и спад импульса, то это уже будет двусторонняя модуляция.
При обоих описанных выше способах модуляции канальной информацией были длительности импульса или же междуимпульсные паузы. Амплитуда импульсов играла при этом второстепенную роль, она необходима была лишь для обеспечения надежной работы дешифратора в приемнике.
Частотно-импульсная модуляция
При этом виде модуляции каждому значению сигнала соответствует точно определенная частота повторения импульсов (рис. 7.13 з). Приемник должен содержать устройство, преобразующее частоту импульсов в зависимое от нее напряжение. Встречается также частотно-импульсная модуляция в сочетании с широтно-импульсной. Один сигнал управления модулирует частоту импульсов, а другой — их ширину. При этом типе передачи имеется некоторое взаимное влияние обоих сигналов. Если Ти=0=Т, то не может передаваться никакая частота.
Описанная система модуляции была использована несколько лет тому назад в американской аппаратуре «Space-Control», а затем и в аппаратуре «Orbit-Proportional», английских аппаратах RCS «Tetraplex» и др. Подобные решения часто встречаются в любительских конструкциях. Для примера можно упомянуть простые устройства для пропорционального управления с исполнительным механизмом, общим для руля направления и руля высоты (см. рис. 8.5 а).
Кодо-импульсная модуляция
Эта модуляция применяется в так называемых цифровых системах дистанционного управления. Сигнал управления низкой частоты преобразуется в кодовые группы импульсов с одинаковыми амплитудой, длительностью и формой и модулирует ВЧ. Передаваемый сигнал кодируется в бинарный (двоичный) код. В пропорциональном управлении каждое отклонение руля соответствует двоичному числу. Для отдельных каналов передается только информация, содержащая позиции «Включено—Выключено» (1 или 0).
Располагая возможностью передачи четырех разрядов, получаем максимальное количество 1111=15 различных управляющих значений, например 15 ступенчатых отклонений руля. Для передачи четырех двоичных единиц нужны четыре канала, образуемые последовательной посылкой кодовых импульсов. Если, например, цифра 7 определяет положение руля в нейтрали, то ее преобразуют в двоичную систему счета (7=0111) и передают в виде последовательности импульсов (рис. 7.13 и). Последовательность импульсов на рис. 7.13 к определяет число 10 (1010) и соответствующее ему положение руля.
Импульсные коды могут быть различными — классическими и индивидуальными, со сдвоенными импульсами и т. п. При этом вовсе не обязательно иметь код, составленный из последовательных двоичных чисел. Следует подчеркнуть, что кодо-импульсная модуляция обеспечивает очень высокую помехоустойчивость. Но, с другой стороны, для того чтобы получить многоканальное управление с достаточной точностью отклонений рулей, надо пользоваться большим числом двоичных каналов. Например, при отклонении руля по 30 промежуточным градациям при четырех органах управления в модели (два руля, элероны и управление двигателем) требуются 20 каналов, что серьезно усложняет передающее и принимающее устройства.
Кодо-импульсная модуляция в технике дистанционного управления применяется ограниченно, что объясняется прежде всего большой стоимостью и сложностью системы.
Синхронизация
Во всех системах управления, где используется импульсная модуляция, мы встречаемся с проблемой синхронизации. Ее задачей является выделение тактовых (синхронизирующих) сигналов, поступающих на надлежащие исполнительные механизмы в модели. Существует много различных методов синхронизации, зависящих от принятой системы модуляции импульсов.
Последовательность импульсов для многооперационного (многоканального) управления содержит столько импульсов, сколько каналов надо привести в действие. С момента, когда послана данная последовательность импульсов, каждый канал получает свой сигнал и весь цикл может начинаться заново. Иногда после последнего импульса остается длинная пауза (рис. 7.13 л), которая означает начало следующего цикла импульсов. Дешифратор в приемнике содержит соответствующий элемент для обнаружения междуимпульсной паузы в сигнале и устанавливает счетчик в исходное положение. Он как бы выполняет роль сбрасывателя предыдущего сигнала (синхронизатора). Этот элемент должен точно определить время, прошедшее между двумя циклами работы устройства.
На рис. 7.13 л продолжительность паузы между двумя канальными импульсами равна 1 мс, а после окончания цикла импульсов — 3 мс. В этом примере элемент, распознающий паузы, настраивается на время, например, 2 мс. Если за это время на приемник не поступит ни один канальный импульс, то это будет означать, что цикл импульсов закончен, и вся система возвращается в исходное положение, чтобы через несколько миллисекунд снова начать отсчет нового цикла импульсов.
Описанный вид синхронизации выгоден только тогда, когда все сигналы передаются непрерывно, причем определенным способом.
Применяют также синхронизирующие импульсы (рис. 7.13 м, н), регулярно посылаемые передатчиком и указывающие начало каждого нового цикла импульсов, даже если канальные импульсы не посылаются. Чтобы дешифратор в приемнике мог отличить синхронизирующие импульсы от канальных, первые должны быть значительно более широкими. В этом случае в приемнике имеется элемент, распознающий ширину синхронизирующего импульса (вместо ранее описанной междуимпульсной паузы) и выделяющий его из канальных импульсов.
Если мы имеем дело с системой пропорционального управления, использующей широтно-импульсную модуляцию (когда отдельные канальные импульсы имеют переменную ширину), то в качестве синхронизирующих импульсов можно применять очень короткие импульсы. Их выделение происходит так же, как в предыдущих примерах. Далее возможно использование двух синхронизирующих импульсов, следующих через определенный интервал времени, а также коротких «пачек» импульсов со звуковой частотой.
В системе амплитудно-импульсной модуляции синхронизирующий импульс может иметь большую амплитуду, чем канальные импульсы, выделяемые в соответствующем амплитудном дискриминаторе. Еще раз подчеркнем, что этот вид модуляции меньше всего применяется в технике дистанционного управления моделями. Дело в том, что при выборе того или иного вида синхронизации надо всегда учитывать восприимчивость его к внешним помехам, а их в условиях дистанционного управления всегда больше, чем в других случаях.