
Аппаратура на модели Евгения Медведева включает в себя сверхрегенеративный приемник с дешифратором и блок автоматики. Приемник, дешифратор и два реле блока автоматики монтируются на платах из фольгированного гетинакса методом объемно-навесного монтажа. Дешифратор приемника содержит три ячейки, собранные по схеме, показанной на рис. 54. В дешифраторе применены реле РЭС-9 (паспорт 202). Они регулируются путем ослабления усилия пружины якоря на срабатывание при токе 50 ма.
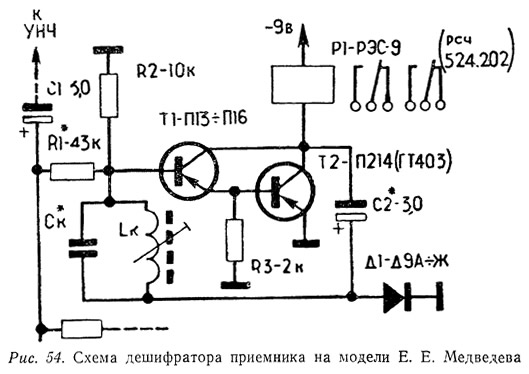
Размеры плат: приемника — 60x90 мм, дешифратора — 90x100 мм.
Приемник питается от одной батареи БКС-Л-0,50, а дешифратор и блок автоматики — от двух батарей КБС-Л-0,50.
В аппаратуре всего 5 реле РЭС-9, из которых три (P₁, Р₂, Р₃) — в дешифраторе приемника и два (Р₄ и Р₅) — вне его. Проследим как же с помощью трех каналов осуществляется управление моделью (рис. 55).
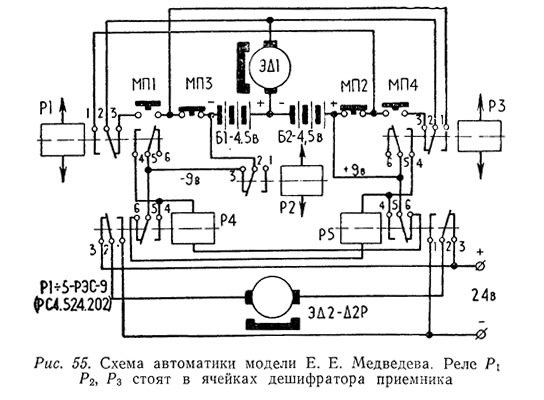
С помощью аппаратуры подаются три команды: «Влево», «Вправо», «Стоп». Команды «Вперед» и «Назад» подают, используя каналы, по которым подаются команды «Влево» и «Вправо».
Например, необходимо включить ходовой электродвигатель на ход «Вперед». Для этого подается кратковременно команда «Вправо». Срабатывает реле Р₃. Контакты 4 и 5 этого реле замыкаются и напряжение +9 в подается на один конец обмотки реле Р₅. На второй же конец обмотки этого реле напряжение —9 в уже подано через нормально замкнутые контакты 2 и 3 реле Р₂ и контакты 5 и 6 реле Р₄. В результате реле Р₅ срабатывает и самоблокируется через контакты 4 и 5. Одновременно с этим замыкаются контакты 1 и 2, включая питание ходового электродвигателя. Модель пойдет вперед. Теперь можно ею управлять, подавая команды: «Вправо» и «Влево». При этом реле Р₄ не будет срабатывать, так как контакты 5 и 6 реле Р5 разомкнуты. Следовательно, чтобы сработало реле Р₄ и модель пошла назад, необходимо разблокировать реле P₅, что осуществляется с помощью команды «Стоп». Эта команда включает реле дешифратора Р₂, контакты которого 2 и 3 размыкаются и обесточивают обмотку реле Р₅. Модель остановится. При подаче кратковременной команды «Влево» срабатывает реле дешифратора Р₄ и, как в первом случае, заблокируется реле Р₄. Его контакты 1 и 2 замыкаются и включают питание ходового электродвигатели. Модель пойдет назад.
Другой важной частью автоматики является система управления поворотами модели во время ее движения. В качестве рулевого двигателя используется малогабаритный электродвигатель от механических игрушек. К нему изготавливается редуктор, на выходном валу которого должно быть 100—150 об/мин. После того как кнопка команды поворота отпускается, передние колеса автоматически возвращаются в нейтральное положение. Это осуществляется с помощью двух кулачковых переключателей рулевого механизма и четырех микропереключателей типа МП-7, два из которых (МП2 и МП3) служат концевыми выключателями, а два других (МП1 и МП4) обеспечивают возвращение колес в первоначальное положение.
При срабатывании, например, реле Р₁ левого поворота оно своими контактами включает реле Р₄ и рулевой электродвигатель. Замыкаются контакты 1 и 2 реле P₁ и плюс батареи Б₂ через концевой выключатель МП2 подается на переключаемый вывод обмотки двигателя до тех пор, пока кулачок переключателя, связанный с рулевой трапецией, не разомкнет контакты МП2. Одновременно другой кулачковый переключатель замкнет МП1. После снятия команды левого поворота контакты 2 и 3 реле Р₁ замыкаются и через них к обмотке двигателя подключается минус батареи Б₁. Рулевой двигатель возвратит колеса в первоначальное положение. Контакты МП1 разомкнутся. Аналогичным образом взаимодействуют элементы системы при правом повороте. Рассмотренная система телемеханического управления автомоделью надежна и удобна в эксплуатации и может быть рекомендована моделистам-спортсменам.