
Этот механизм имел только два рабочих положения: влево — вправо или вверх — вниз. Переключая механизм с одинаковой скоростью, получали эффект, аналогичный положению руля нейтрали, если же меняли время переключения механизма из одного положения в другое (с помощью широтно-импульсной модуляции), то можно было добиться плавного отклонения руля в обе стороны. Полет модели с таким исполнительным механизмом при правильном подборе частоты следования импульсов и выборе параметров модели происходил без видимого влияния колебаний руля. Основным недостатком такого механизма является самопроизвольное отклонение руля в крайнее положение при потере радиосвязи, что может привести к повреждению модели.
В системах пропорционального управления применяют также исполнительные механизмы дискретного действия с тремя позициями. Такие механизмы приводятся в действие микроэлектродвигателями и имеют электрический возврат в нейтраль. Для получения плавных отклонений руля исполнительные механизмы также питают импульсным напряжением, что снижает стабильность их работы, так как они не имеют обратной связи.
Исполнительные механизмы дискретного действия с центрирующей пружиной относятся к группе трехпозиционных механизмов. Возврат в нейтраль у них происходит не электрическим путем (как в случае описанных выше механизмов), а под действием пружины или резиновой ленты, которые во время отклонения руля натянуты.
Механизмы этого типа можно применять в пропорциональном управлении, поскольку у них такая же линейная характеристика, как, например, у мембранного механизма. Это связано с тем обстоятельством, что вращающий момент микроэлектродвигателя постоянного тока приближенно прямо пропорционален приложенному напряжению. Поскольку центрирующая пружина дает обратное усилие, прямо пропорциональное отклонению вала двигателя (и руля), то получается движение исполнительного механизма, пропорциональное приложенному напряжению (вал микроэлектродвигателя вращается до тех пор, пока не уравновесятся силы микродвигателя и возвратной пружины).
На практике эти механизмы (вернее, их микроэлектродвигатели) чаще всего управляются импульсами (рис. 10.6 а). Перечислим их основные недостатки:
- 1) нейтральное положение механизма соответствует нулевому напряжению при отклонении руля в разные стороны, требуется прикладывать напряжение различной полярности;
- 2) микроэлектродвигатель потребляет ток постоянно, причем величина его возрастает пропорционально отклонению руля и значительна также при положении руля в нейтрали;
- 3) возврат механизма в нейтраль вызывается не только действием возвратной пружины, но также, например, аэродинамическим или гидродинамическим напором на руль;
- 4) на работу механизма влияет масса руля модели;
- 5) если механизм управляется импульсами, то всегда возникают некоторые вибрации руля. Их влияние на качество полета может быть сведено до минимума путем подбора надлежащей частоты импульсирования и инерционности модели;
- 6) имеется большая вероятность вибраций руля в положении, близком к нейтрали, поскольку центрирующие силы около этого положения невелики.
С этими недостатками можно бороться следующим образом.
Недостаток 1 устраняется при подаче на электродвигатель импульсов напряжения с равными по длительности паузой и импульсом со средним значением, равным нулю.
Недостаток 2 можно устранить, используя так называемый трехпозиционный переключатель, показанный на рис. 8.3. Обычные управляющие импульсы прямоугольны. Тогда независимо от отношения пауза/импульс средний ток, потребляемый исполнительным механизмом, всегда равен 100%. Добавив элемент, состоящий из двух кремниевых диодов — Д1 и Д2 (это могут быть кремниевые транзисторы, включенные как диоды), и электролитический конденсатор СУ, получим преобразование прямоугольных импульсов в треугольные. Это позволяет уменьшить ток, потребляемый при отношении пауза/импульс 50:50, до 50%, при 30:70 — до 60% и при 10:90 — до 80% среднего значения в системе с прямоугольными импульсами. Следует добавить, что это не влияет отрицательно на величину управляющей силы, развиваемой исполнительным механизмом и, более того, это ускоряет реакцию механизма на движение ручек управления в передатчике.
Величины R1 и С1 на схеме определяют частоту повторения импульсов 8 Гц. Для меньшей частоты следует увеличить емкость С1. С конденсатором С1 порядка 100,0 мкФ можно уменьшить ток, потребляемый исполнительным механизмом при отношении пауза/импульс 50:50 (руль в нейтрали), до нуля. Но тогда будет нарушена линейная характеристика зависимости движений руля и ручки управления передатчика.
С недостатком 3 можно бороться аэродинамическим балансированием руля. Однако некоторые радиомоделисты утверждают, что обратное воздействие аэродинамического напора на отклонения руля желательно, поскольку при больших скоростях полета получается та же эффективность управления с малым отклонением руля, что и при малых скоростях с большим отклонением. Иначе говоря, эффект управления (но не отклонения руля!) остается для каждого определенного отклонения ручки управления одинаковым при любой скорости полета. Ясно, что этого явления нет при жесткой передаче (когда данное движение ручки управления всегда вызывает одно и то же отклонение руля).
Недостаток 4 можно ликвидировать путем статического (и динамического) уравновешивания руля.
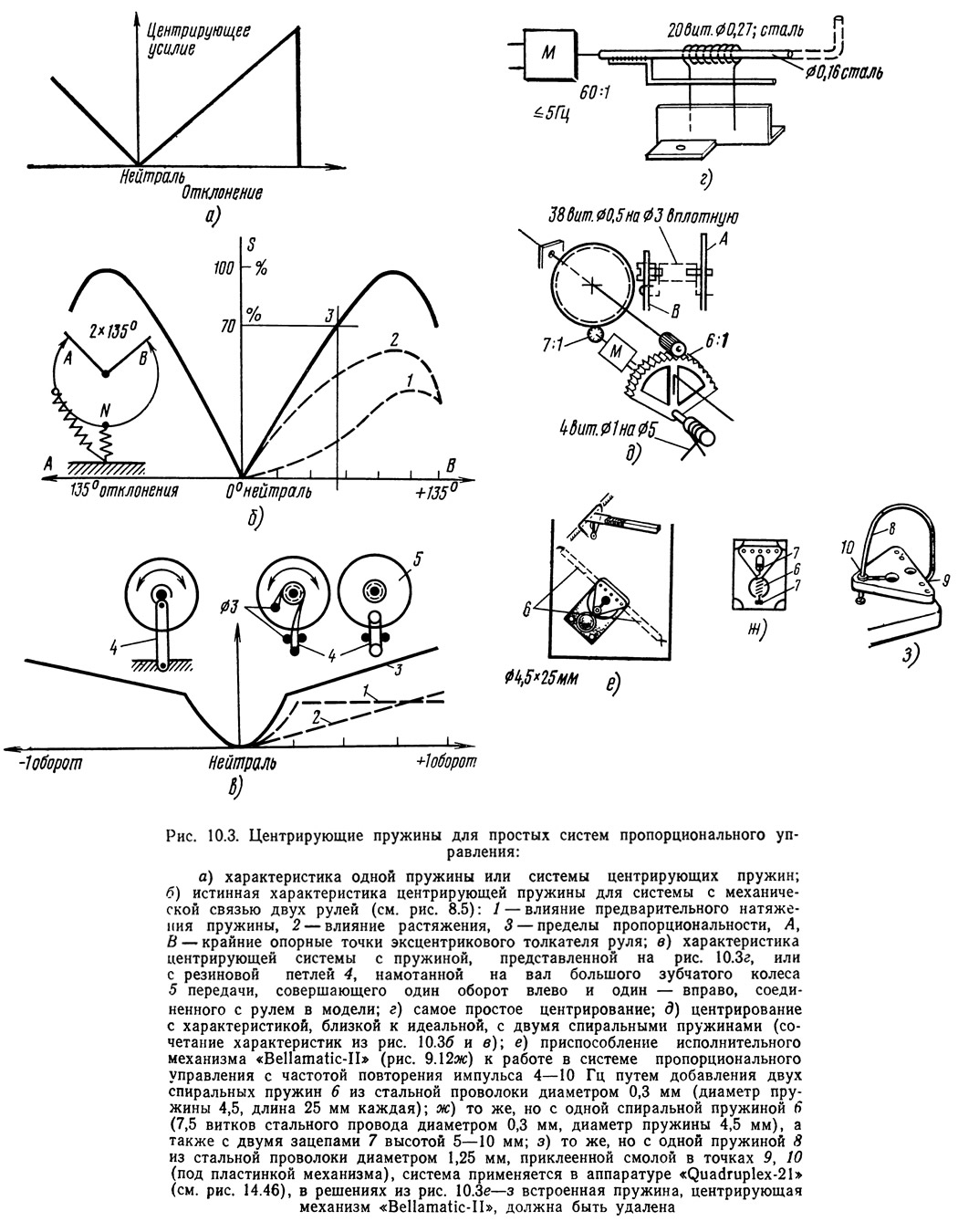
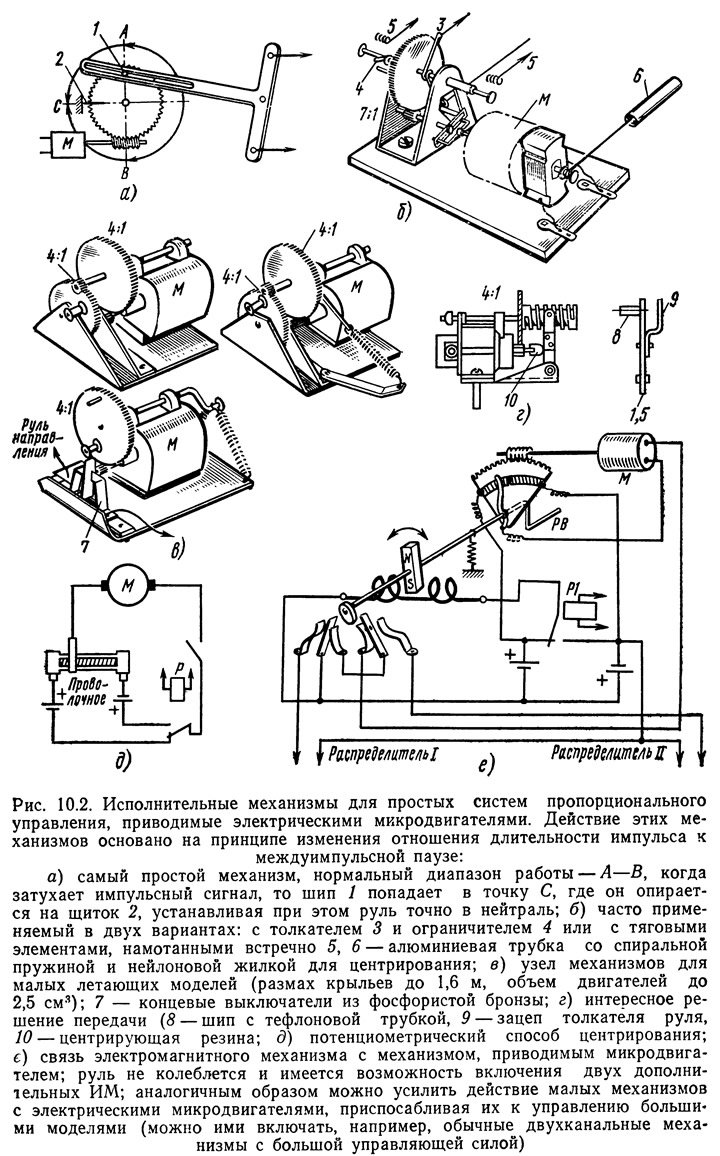
В качестве исполнительных механизмов для пропорционального управления чаще всего используют механизмы заводского изготовления типов «Bellamatic-II» и «Duomatic» и специально сконструированный для аппаратов «Quadruplex» механизм «Dee Вее-ТТ» с оригинальной системой центрирующих пружин (рис. 10.3 з), обеспечивающий хорошее центрирование в диапазоне отклонений 2·35°.
Имеется также много самодельных конструкций такого типа (рис. 10.3). Пружины или центрирующие резиновые полоски надо регулировать индивидуально, стараясь получить такую характеристику работы механизма (при взаимодействии с передатчиком), как на рис. 10.3 б. Можно также применять центрирование, показанное на рис. 10.2 б.